Student name:
JonatanKogeus
Department:Medical Engineering
Advisor name:
Yael Danai-Menuhin
RemoteOperatedRoboticHandwithHapticFeedback
2014
---
2
Description
Part
Microcontroller, the “brain” of the system, responsible for
receiving data from all other components, processing and
sending it forward
Arduino Uno
Responsible for sending and receiving the databetween
the robotic hand and the glove
APC 220RFTransceiver
Metal gear servo, operates the fingers on the robotic hand
MG 995Servo
Standard gear (nylon) servo, acts as the stopping
mechanism on the glove
SG90Servo
Force sensitive resistors, acts as indicators if the robotic
hand fingers graspedanobject
FSR400
Usedas finger angle indicators on the glove, which will be
translated tomovement on the robotic hand
Flex Sensor
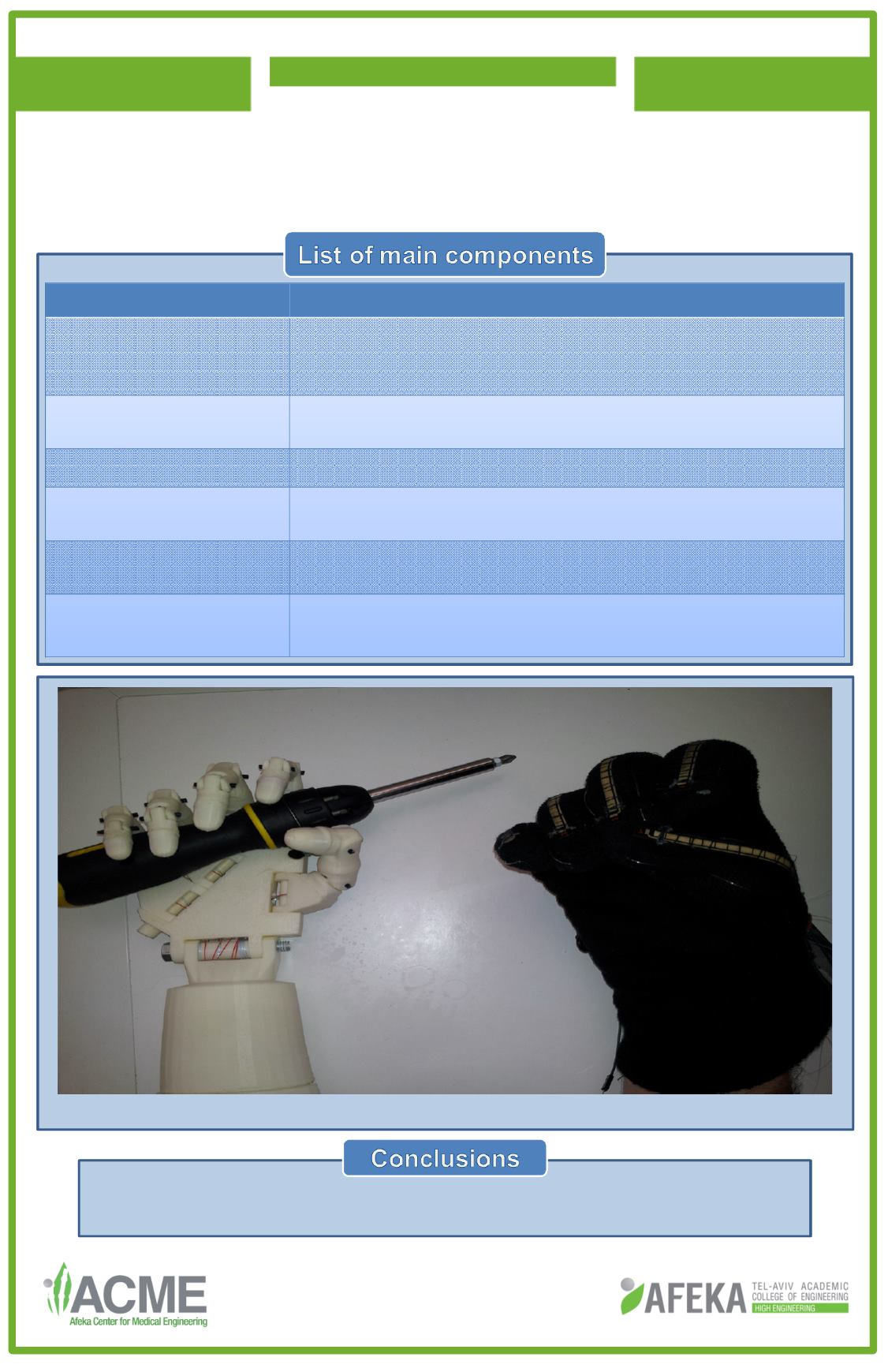
Holding a screwdriver for sensors calibration
The developed system enables peoplewith paralysis in the limbs perform daily
activities moreeasily and thus improve their quality of life.


