Participating Students:
Maayan Harel –Gabi Yaniv
Department:
Mechanical Engineering
Advisor:
M.Sc. Uri Soudak
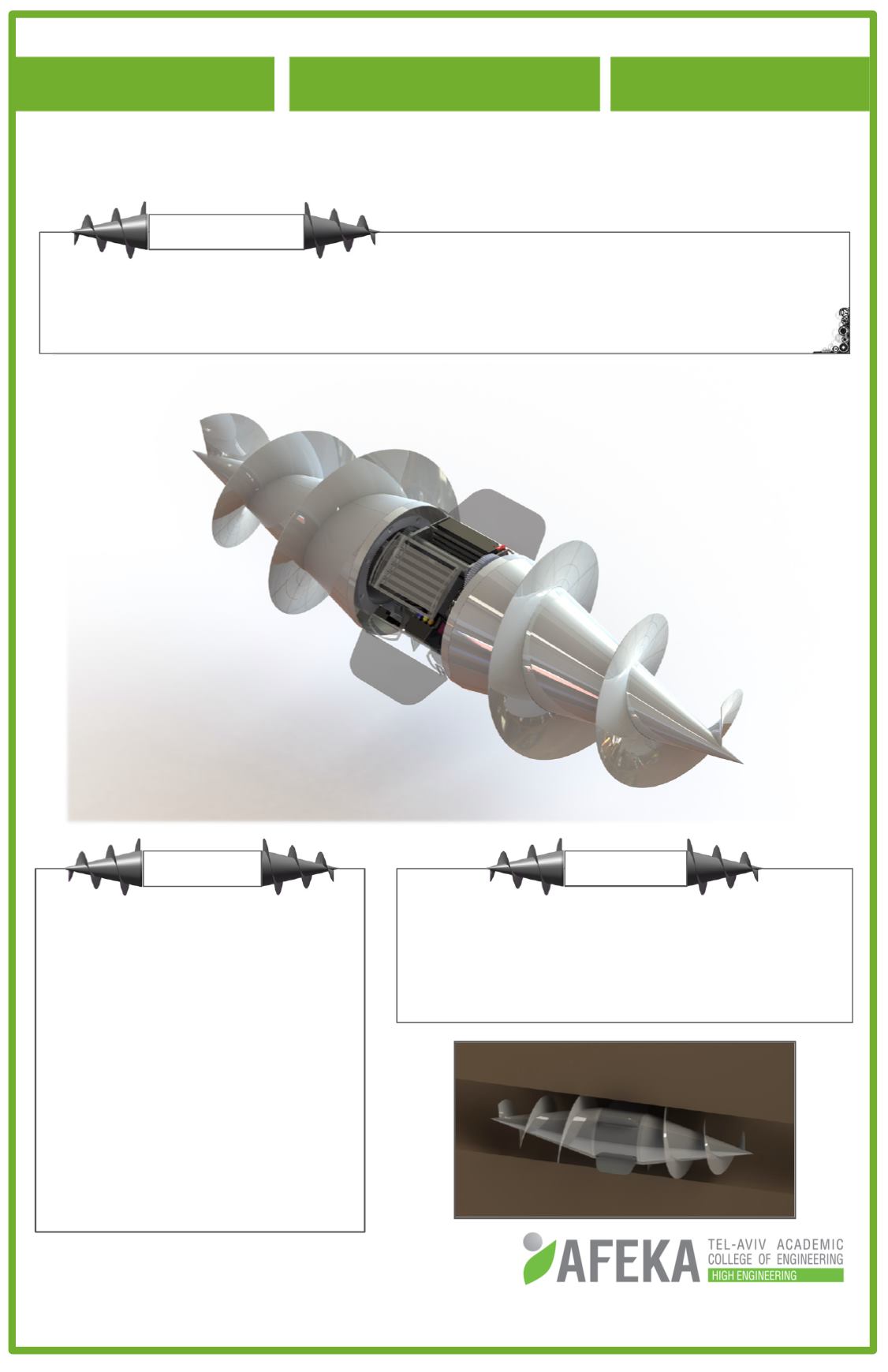
RoboticMole
2014
-
4
Demands
Background
Goal
•Lightweight and easy to carry
•Remotely controlled
•Underground progression in
sandy soil
•Compact design
•Functional mechanism
•Low drag and friction design
•Symmetric as possible
•Easy tomanufacture
•Modular and easy tomaintain
•High durability
• Impenetrable design
To designandbuild a compact and
mobile robot capableof
progressing througha sandhill
For either collecting intelligence, layingdown infrastructureor transportingcargo
progression underground isa vital and necessary attribute in themodernage.
Thisproject is intended tobe a first cornerstone in thematter.


