Student name:
Yair Prayev
LeonYoffe
Ruti Uzan
Department:
SystemsEngineering
Advisor name:
Dr. Shmuel Shelef
2014
--
4
A
utonomous
G
round
A
ir Team
MobileBorder ProtectionSystem
Feasibility
Themain risk in this project is the application of the specific
UAV
feasibility
. The risk stems from the fact that the maximum
payload of theMD4-1000 is
1.2Kg
.
Parameters
COTScomponent
Weight
WeightBudget
Allocation
Component
Daylight camera:
D -
14,000m,
R-
4200m,
I -
2600m
IR camera:
D -
2000m,
R -
500m,
I -
250m
200-300 g
500 g
Camera
Range 5,000m
100-200 g
200 g
Rangefinder
Communicationrange: 15,000m
71g
500 g
Video
transmitter
Communi-
cation
devices
161g
TxAntenna
Communicationrange: 15,000m
14g
Control data
transceiver
10-50g
Antenna
797 g
1200 g
Total
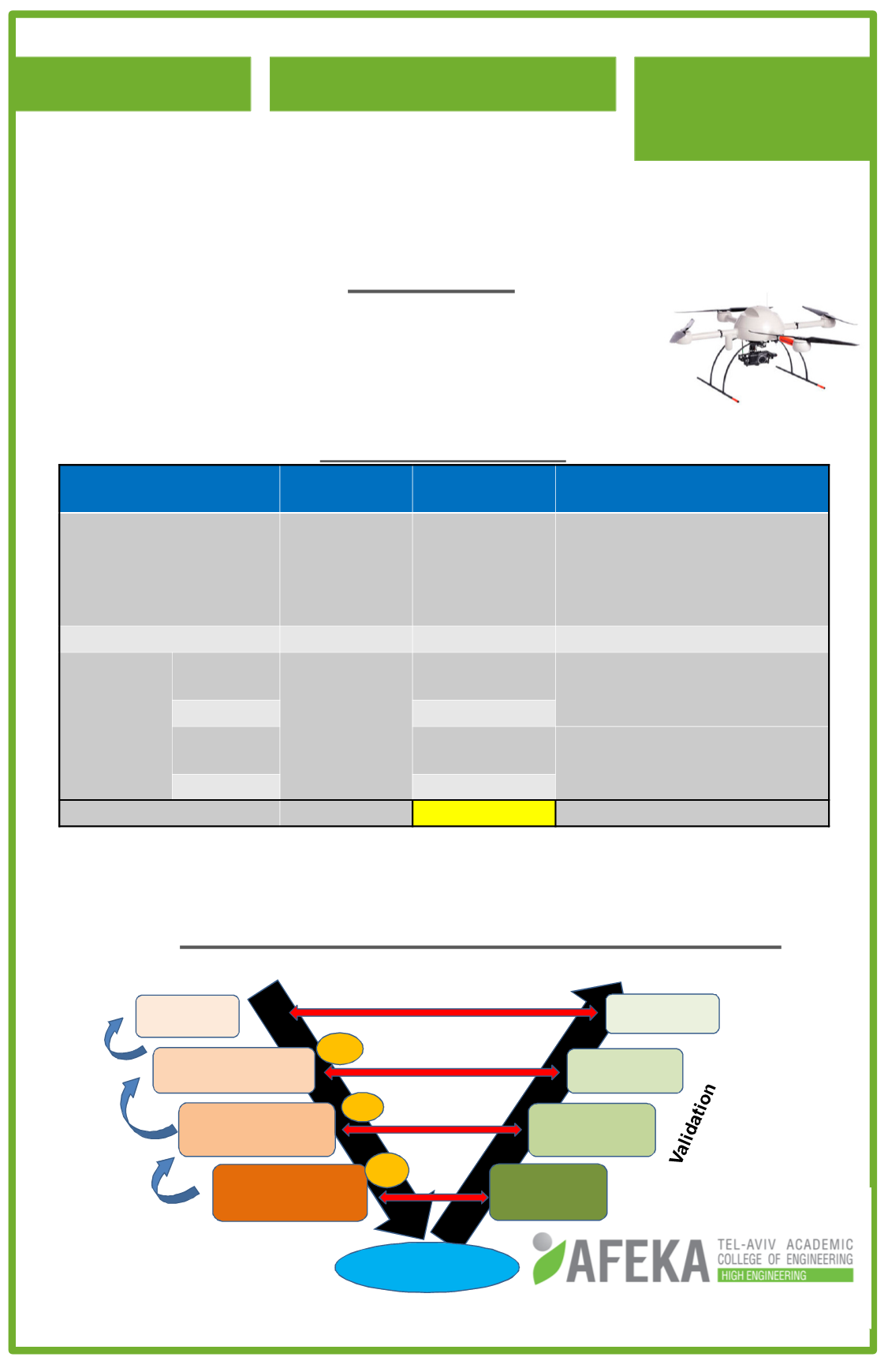
Weight Budget Allocation
Volererequirements
Analysis, Initial Functional
Analysis
Trade&FeasibilityStudy,
Full FunctionalAnalysis,
etc
DetailedDesign, System
BehaviorAnalysisvia
FuzzyLogic
DesignProof -
Simulation
Unit Testing
Integration
Testing
SystemTesting
User
Requirements
Useracceptance
test
Verification
Verification
SDR
PRR
CDR
Review & test
Review & test
Review & test
AGASystemDevelopment Life-Cycle
D–Detection, R–Recognition, I - Identification
This table clearlyshows the feasibility of our solution, with~800gpayloadweight on
MD4-1000. The remaining weight will allow future functionality or range additions.


